Ein Bezugssystem muss mit mindestens einem Koordinatennetz überzogen werden können und eine [[Metrik]] aufweisen. In der vorrelativistischen Physik ist die Metrik unabhängig von der Verteilung der [[Materie]] oder etwas präziser ausgedrückt unabhängig von der Verteilung von [[Energie]] und [[Impuls]] (unabhängig von der Gestalt des [[Energie-Impuls-Tensor|Energie-Impuls-Tensors]]).
Ein Bezugssystem muss mit mindestens einem Koordinatennetz überzogen werden können und eine [[Metrik]] aufweisen. In der vorrelativistischen Physik ist die Metrik unabhängig von der Verteilung der [[Materie]] oder etwas präziser ausgedrückt unabhängig von der Verteilung von [[Energie]] und [[Impuls]] (unabhängig von der Gestalt des [[Energie-Impuls-Tensor|Energie-Impuls-Tensors]]).
In der vorrelativistischen Mechanik lässt sich Lage eines Punktes zu jedem Zeitpunkt relativ zum Bezugssystem angeben, wobei die Angaben von der Wahl eines konkreten [[Koordinatensystem|Koordinatensystems]] abhängt. UnterschiedlicheKoordnatenbezüglichdesgleichenBezugssystemslassensichdurchreingeometrischeTransformationenineinanderüberführen.
In der vorrelativistischen Mechanik lässt sich die Lage eines Punktes zu jedem Zeitpunkt relativ zum Bezugssystem angeben, wobei die Angaben von der Wahl eines konkreten [[Koordinatensystem|Koordinatensystems]] abhängt. In jedem Bezugssystem gilt die Euklidsche Metrik, wonach die Länge einer Strecke unabhängig von der Wahl des Koordinatensystems sein soll. Dies impliziert folgenden Einschränkungen und Regeln
*Unterschiedliche Koordnaten bezüglich des gleichen Bezugssystems lassen sich durch rein geometrische Transformationen ineinander überführen. Lässt man nur kartesische Koordinatensysteme zu, ist die Transformation orthogonal.
*Bewegen sich zwei Systeme gleichförmig gegeneinander und führt man auf beiden Systemen gleich gerichtete, kartesische Koordinatensysteme ein, gilt die [[Galilei-Transformation]].
*Neben den gegenüber dem absoluten Raum gleichförmig bewegten Systemen, den Inertialsystemen, führt man oft noch Bezugsysteme ein, die fest mit einem starren Körper verbunden sind. Nimmt man ein gleichmässig [[rotierendes Bezugssystem]], tauchen zwei zusätzliche Trägheitskräfte, die [[Zentrifugalkraft]] und die [[Corioliskraft]], auf.
In der relativistischen Mechanik bilden Raum und Zeit eine vierdimensionale Raumzeit, wobei lokal, im Tangentialraum, die Lorentz-Metrik gilt.
==absoluter Raum==
==absoluter Raum==
Aktuelle Version vom 13. März 2007, 09:29 Uhr
Ein Bezugssystem ist ein Referenzsystem, auf das die Gesetze der Mechanik und auch der Elektrodynamik bezogen werden. Der Begriff des Bezugssystem hat im Laufe der Jahrhunderte eine grosse Wandlung und auch Erweiterung erfahren.
Eigenschaften
Ein Bezugssystem muss mit mindestens einem Koordinatennetz überzogen werden können und eine Metrik aufweisen. In der vorrelativistischen Physik ist die Metrik unabhängig von der Verteilung der Materie oder etwas präziser ausgedrückt unabhängig von der Verteilung von Energie und Impuls (unabhängig von der Gestalt des Energie-Impuls-Tensors).
In der vorrelativistischen Mechanik lässt sich die Lage eines Punktes zu jedem Zeitpunkt relativ zum Bezugssystem angeben, wobei die Angaben von der Wahl eines konkreten Koordinatensystems abhängt. In jedem Bezugssystem gilt die Euklidsche Metrik, wonach die Länge einer Strecke unabhängig von der Wahl des Koordinatensystems sein soll. Dies impliziert folgenden Einschränkungen und Regeln
Unterschiedliche Koordnaten bezüglich des gleichen Bezugssystems lassen sich durch rein geometrische Transformationen ineinander überführen. Lässt man nur kartesische Koordinatensysteme zu, ist die Transformation orthogonal.
Bewegen sich zwei Systeme gleichförmig gegeneinander und führt man auf beiden Systemen gleich gerichtete, kartesische Koordinatensysteme ein, gilt die Galilei-Transformation.
Neben den gegenüber dem absoluten Raum gleichförmig bewegten Systemen, den Inertialsystemen, führt man oft noch Bezugsysteme ein, die fest mit einem starren Körper verbunden sind. Nimmt man ein gleichmässig rotierendes Bezugssystem, tauchen zwei zusätzliche Trägheitskräfte, die Zentrifugalkraft und die Corioliskraft, auf.
In der relativistischen Mechanik bilden Raum und Zeit eine vierdimensionale Raumzeit, wobei lokal, im Tangentialraum, die Lorentz-Metrik gilt.
absoluter Raum
Der absolute Raum ist von Isaac Newton (* 4. Januar 1643 in Woolsthorpe-by-Colsterworth in Lincolnshire; † 31. März 1727 in Kensington) zur Begründung der Mechanik postuliert worden. Der absolute Raum ist ein sowohl vom Beobachter als auch von den darin enthaltenen Objekten und darin stattfindenden physikalischen Vorgängen unabhängiges Objekt, auf das alle Bewegunen letztendlich zu beziehen sind, d.h. alle Bewegungen finden relativ zu diesem absoluten Raum statt, ohne dass diese Prozesse auf den Raum zurückwirken können.
Das zentrale Argument Newtons für einen absoluten Raum basiert auf Beobachtungen, die Newton selber mit einem Wassereimer angestellt hatte:
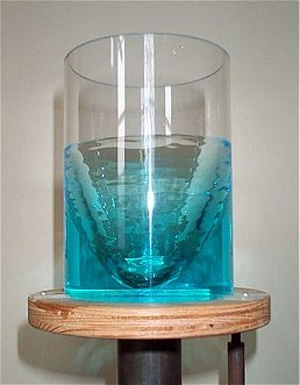
im rotierenden Gefäss steigt das Wasser am Rand hochEin mit Wasser gefüllter Eimer wird an einem Seil aufgehängt. Verdreht man das Seil und lässt den Eimer los, beginnt dieser zu rotieren. Anfangs ist die Wasseroberfläche noch eben. Nach einer kurzen Zeit macht das Wasser durch Reibungskräfte die Rotation des Eimers mit und es bildet sich eine konkave Oberfläche. Hält man den Eimer an, wird das Wasser noch eine kurze Zeite weiter rotieren und seine konkave Oberfläche behalten. Sobald Wasser und Eimer in Ruhe sind, ist die Wasseroberfläche wieder eben.
Das Wasser steigt also nur hoch und bildet eine paraboloide Oberfläche, wenn es sich gegenüber einem aussenstehenden Beobachter bewegt. Die konkrete Gestalt der Wasseroberfläche hängt nur von der Winkelgeschwindigkeit des Wassers gebenüber einem aussenstehenden Beobachter ab. Die Bewegung des unmittelbar berührenden Gefässes, des Kessels, hat dagegen keinen Einfluss auf die konkrete Gestalt der Wasseroberfläche.
Newtons Argument bezieht sich aber nur auf die Rotation und nicht die Translation. Befindet sich der Wasserkessel in einem fahrenden Zug, bleibt die Oberfläche eben, solange der Zug selber gegenüber der Erde nicht beschleunigt ist. Zudem ist die Erde selber ein rotierendes System, das auf das Wasser im Kessel scheinbar keine Wirkung ausübt. Den ersten Einwand gegen den absoluten Raum hat Newton mit seinem ersten Axiom, wonach sich ein kräftefreier Körper mit konstanter Geschwindigkeit (gegenüber dem absoluten Raum) geradeaus bewegt, selber entkräftet. Den zweite Einwand, wonach die Rotation der Erde gegenüber dem absoluten Raum ebenfalls zu einer kleinen, für Newton nicht direkt messbaren Wölbung der Wasseroberfläche führen müsste, konnte erst Einstein vollständig beseitigen.